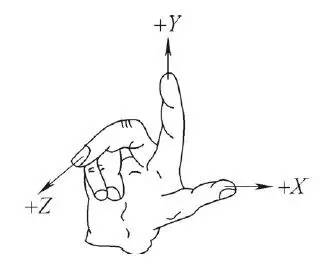
图1 典型机器人各运动轴
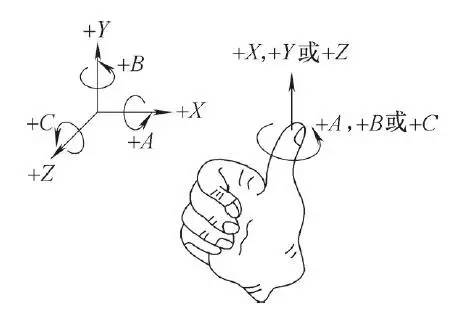
图2 YASKAWA工业机器人各运动轴的关系
2. 机器人坐标系确定
机器人程序中所有点的位置都和坐标系关联,同时这个坐标系也可能和另一个坐标系关联。
机器人的各种坐标系都由正交的右手定则来决定,如图3所示。当围绕平行于X 、Y 、Z 轴线的各轴旋转时,分别定义为A 、B 、C 。A 、B 、C 的正方向分别是X 、Y 、Z 正方向上右手螺旋前进的方向(见图4)。
图3 右手坐标系
图4 旋转坐标系
常用的坐标系是绝对坐标系、机座坐标系、机械接口坐标系和工具坐标系。
(1)绝对坐标系与机器人的运动无关,以地球为参照系的固定坐标系(见图5),符号为O 0、X 0、Y 0、Z 0。原点O 0、+X 0轴由用户根据需要来确定;+Z 0轴与重力加速度的矢量共线,但方向相反。
(2)机座坐标系是以机器人机座安装平面为参照系的坐标系,符号为O 1、X 1、Y 1、Z 1。原点O 1由机器人制造厂规定;+Z 1轴垂直于机器人机座安装面,指向机器人机体;X1轴方向由原点指向机器人工作空间中心点Cw(见GB/T12644—2001)在机座安装面上的投影。当由于机器人的构造不能实现此约定时,X 1轴的方向可由制造厂规定。
(3)机械接口坐标系是以机械接口为参照系,符号为O m、X m、Y m、Z m。原点O m是机械接口的中心;+Z m轴的方向垂直于机械接口中心,并由此指向末端执行器;+X m轴由机械接口平面和X 1、Z 1平面(或平行于X 1、Z 1图2 YASKAWA工业机器人各运动轴的关系图3 右手坐标系 图4 旋转坐标系图5 坐标系示例图6 工具坐标系的平面)的交线来定义,同时机器人的主、副关节轴处于运动范围的中间位置。当机器人构造不能实现此约定时,应由制造厂规定主关节轴位置。+X m轴的指向远离Z 1轴。
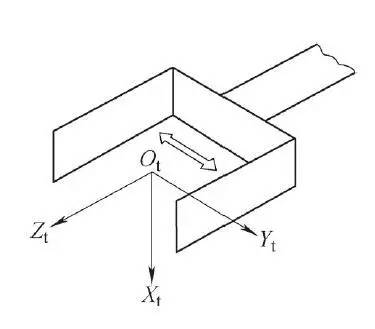
(4)工具坐标系以安装在机械接口上的末端执行器为参照系(见图6),符号为O t、X t、Y t、Z t。原点O t是工具中心点(TCP);+Zt轴与工具有关,通常是工具指向;在平板式夹爪型夹持器夹持时,+Y t是手指运动平面的方向。
图5 坐标系示例
图6 工具坐标系
3. 工业机器人常用坐标系
(1) 基坐标系( B a s eCoordinate System),又称为机座坐标系,位于机器人基座。如图5所示,它是最便于机器人从一个位置移动到另一个位置的坐标系。基坐标系在机器人基座中有相应的零点,这使固定安装机器人的移动具有可预测性。在正常配置的机器人系统中,工人可通过控制杆进行该坐标系的移动。
(2)世界坐标系(Wo r l dCoordinate System),又称为大地坐标系或绝对坐标系。如果机器人安装在地面, 在基坐标系下示教编程很容易,但当机器人吊装时,机器人末端移动直观性差,因而示教编程较为困难。
另外,如果两台或多台机器人共同协作时,例如,一台安装于地面,另一台倒置,倒置机器人的基坐标系也将上下颠倒( 见图7)。当分别在两台机器人的基坐标系A 、B 中进行运动控制时,很难预测相互协作运动的情况。
图7 世界坐标系
此时,可以定义一个共同的世界坐标系C 取而代之。若无特殊说明,单台机器人世界坐标系和基坐标系是重合的。
(3) 用户坐标系(U s e rCoordinate System),机器人可以和不同的工作台或夹具配合工作, 在每个工作台上建立一个用户坐标系。机器人大部分采用示教编程的方式,步骤繁琐,对于相同工件,若放置在不同工作台进行操作,不必重新编程,只需相应地变换到当前用户坐标系下。用户坐标系在基坐标系或者世界坐标系下建立。
(4)工件坐标系(Obje c tCoordinate System)与工件相关,通常最适于对机器人进行编图7 世界坐标系程。工件坐标系对应工件,它定义工件相对于大地坐标系(或其他坐标系)的位置。
工件坐标系拥有特定附加属性,主要用于简化编程。他拥有两个框架:用户框架(与大地基座相关)和工件框架(与用户框架相关) 。机器人可以拥有若干工件坐标系, 表示不同工件,或者表示同一工件在不同位置的若干状态。对机器人进行编程就是在工件坐标系中创建目标和路径,重新定位工作站中的工件时,只需更改工件坐标系的位置,所有路径将随之更新。允许操作以外轴或传送导轨移动的工件,因为整个工件可连同其路径一起移动。
(5) 置换坐标系(Displacement CoordinateSystem)又称为位移坐标系,有时需要对同一工件、同一段轨迹在不同工位上加工,为了避免每次重新编程,可以定义一个置换坐标系。置换坐标系基于工件坐标系定义。如图8所示,当置换坐标系被激活后,程序中的所有点都将被置换。
图8 置换坐标系
(6) 腕坐标系(WristCoordinate System)和工具坐标系都是用来定义工具方向的。在简单应用中,腕坐标系可以定义为工具坐标系,两者重合。腕坐标系的Z 轴和机器人的第6根轴重合,如图9所示,坐标系原点位于末端法兰盘中心,X 轴方向与图8 置换坐标系图9 腕坐标系法兰盘上标识孔的方向相同或相反,Z 轴垂直向外,Y 轴符合右手法则。
图9 腕坐标系
(7) 工具坐标系(ToolCoordinate System)安装在末端法兰盘上的工具需要在其中心点(TCP)定义一个工具坐标系,通过坐标系的转换,可以操作机器人在工具坐标系下运动,以方便操作。如果工具磨损或更换,只需重新定义工具坐标系,而不用更改程序。工具坐标系建立在腕坐标系下,即两者之间的相对位置和姿态是确定的。
(8) 关节坐标系(Join tCoordinate System)用来描述机器人每个独立关节的运动,关节类型可能不同( 如移动关节、转动关节等)。若将机器人末端移动到期望位置,在关节坐标系下操作,可以依次驱动各关节运动,从而引导机器人末端到达指定的位置。
4. 结语
由于工业机器人品种众多,每种工业机器人的坐标系也很多,其命名、确定方式虽然有标准,但是有的生产厂家又不按标准执行, 各有各的叫法。在实际生产应用时就显得非常混乱麻烦。本文详细介绍了工业机器人坐标轴命名与常用坐标系的确定,以期对使用者有所帮助。

 全国服务热线0757-2667 6803
139 2824 2410
全国服务热线0757-2667 6803
139 2824 2410













 井田手机站
井田手机站

